首页 Home.
-
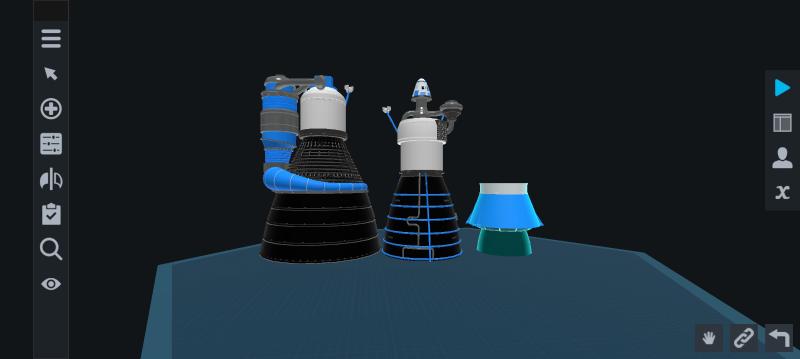
.o0520kk 在游玩朱诺中 你是否会因为想美化上面级 结果发现好看是好看了点 但是燃料不够用于继续飞行 或者在着陆时 着陆器的燃料罐太少 因此坠毁等等 那么这篇文章对你来说是有用的 方法一、更改体积跟质量 先弄一个新火箭 把他的燃料罐体积拉到最大 如下图
2026年04月17日 -
官网存档 : https://www.simplerockets.com/c/aYs4EB/Overlord-Combat-Drone-V3 Overlord Combat Drone V3.xml 该型无人机经过大量部件魔改,作为魔改方法与Vizzy程序演示 为确保游戏物理精度,使用前需进入游戏设
2026年04月14日 -
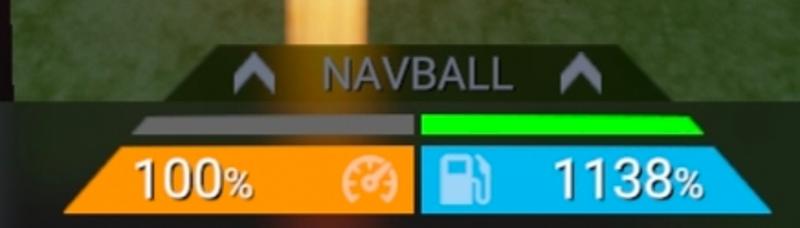
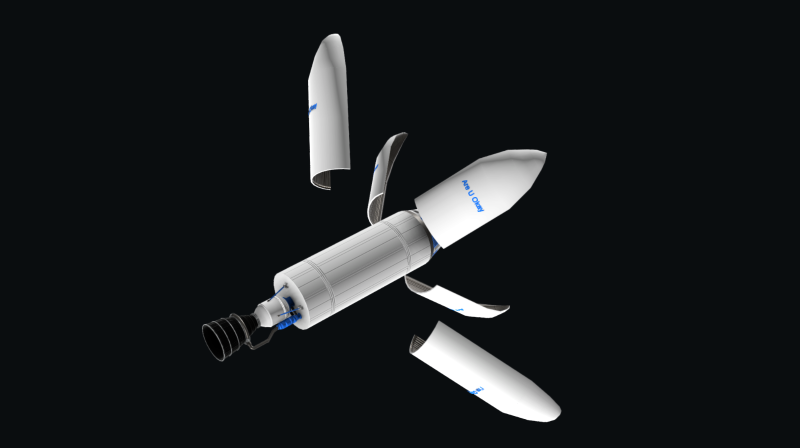
首先 你得有一枚火箭 以游戏自带蓝图“simplebeast”(现实原型美国的土星五号)”为例子(下图) 不过我个人不是特别推荐用这个火箭 比较吃操作 自己造一个最好(本次我个人用的火箭会放在结尾) 可以看到右边有个面板 这个是你这枚火箭的整体数据 这个得讲 因为大多数新手造的火箭问题比如飞不起来
2026年04月05日 -
作者:hgfhvfhh 众所周知,simplerockets.com可以直接注册账号, 但是可能需要科学上网(反正我拿百度点开是空白)。注意,如果你因为“需要验证码”而注册不了,它在朱诺给你发的电子
2026年03月23日 -
2026年03月22日
-
本网站已获得“天顶工作室”视频教程的部分转载授权,授权信息和解释见以下图文。
2026年03月16日 -
这是一个简易的回收方法,精度不高(10米以内)。 如果只是想抄一下程序或者看的不太懂,后面有实例讲解,可以直接抄程序和调节参数。 为了简化教程,教程将火箭和目标,速度,方向控制都视在同一平面内(只是为了方便讲解,实际不影响)。 首先本回收方法的想法是将速度方向控制在目标方向上。
2026年03月07日