

作者:Akagi_Zen
编辑日志
2026.2.27——完成初步编写。
2026.2.28——增加几项条目和示意图。
本术语标准为 “《朱诺:新起源》航天资料库” 内部统一命名规范,用于保证教程、文章等内容术语的一致性。
一、载具 / 构建系统类
Craft,载具,由玩家创作的完整实体。
Part,部件,构成载具的基本单元,
Activation Group,动作组,批量控制部件的开关组。。
Stage,分级,发射阶段系统。
Fuel Tank,燃料舱,推进剂储存装置,
Engine,引擎,推进装置。
RCS,姿态喷口,小推力控制喷口。
Command Pod,指令舱,控制核心。
Fairing,整流罩,保护载荷结构。
Docking Port,对接口,对接装置。
二、姿态与导航类
Prograde,速度顺向,速度正方向。
Retrograde,速度逆向,速度反方向。
Radial In,径向向内,指向天体中心。
Radial Out,径向向外,远离天体中心。
Normal,轨道正法向,轨道面上方向。
Anti-Normal,轨道反法向,轨道面下方向。
Burn Node,机动节点,计划变轨节点。
Heading,航向角,水平角度。
Pitch,俯仰角,上下角度。
Yaw,偏航角,水平偏转。
Roll,滚转角,轴向旋转。
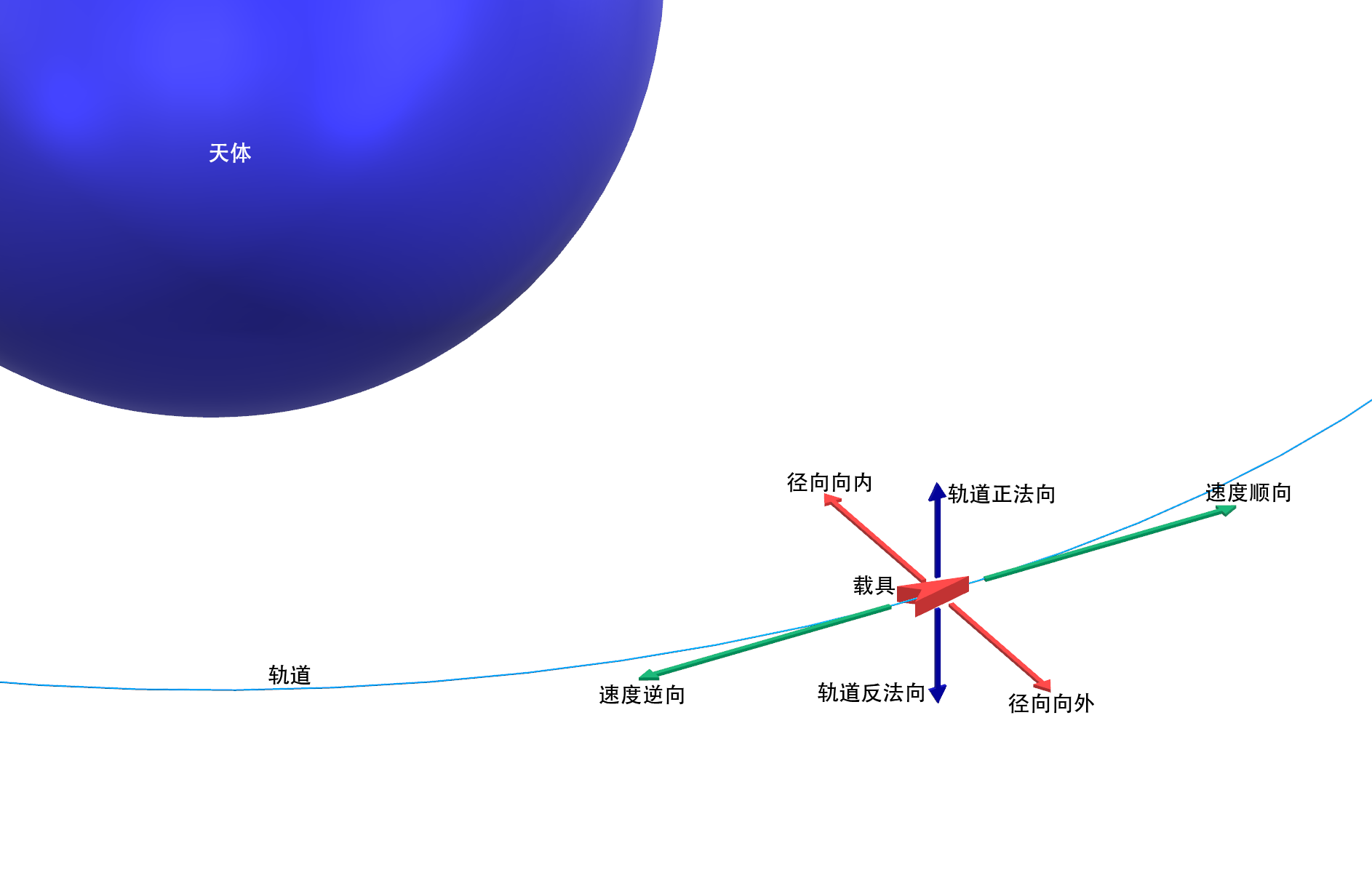
注:轨道正法线的方向由右手定则确定。将右手拇指以外的四指沿着卫星绕行方向弯曲,将右手拇指伸直、垂直于卫星轨道平面,对该卫星轨道平面的法线来说,与此人右手拇指所指方向相同的为正法线。即,在视角为沿径向向内观察载具时,将速度顺向方向以径向方向为轴逆时针旋转90°,即为轨道正法向。
三、轨道与物理类
Apoapsis,远拱点,轨道上距离中心天体最远的位置。
Periapsis,近拱点,轨道上距离中心天体最近的位置。
Orbital Period,轨道周期,完成一圈轨道所需的时间。
Inclination,轨道倾角,轨道平面相对于赤道平面的夹角。
Delta-V,变轨速度增量,可用于改变轨道的总速度储备。
TWR,推重比,推力与载具重量的比值。
Thrust,推力,引擎产生的向前推动力。
Drag,阻力,空气对载具运动产生的反向力。
Lift,升力,垂直于气流方向的力。
Angular Velocity,角速度,单位时间内旋转的角度。
Angular Momentum,角动量,描述物体旋转“惯性大小”的物理量。
Specific Impulse,比冲,衡量引擎效率的指标。
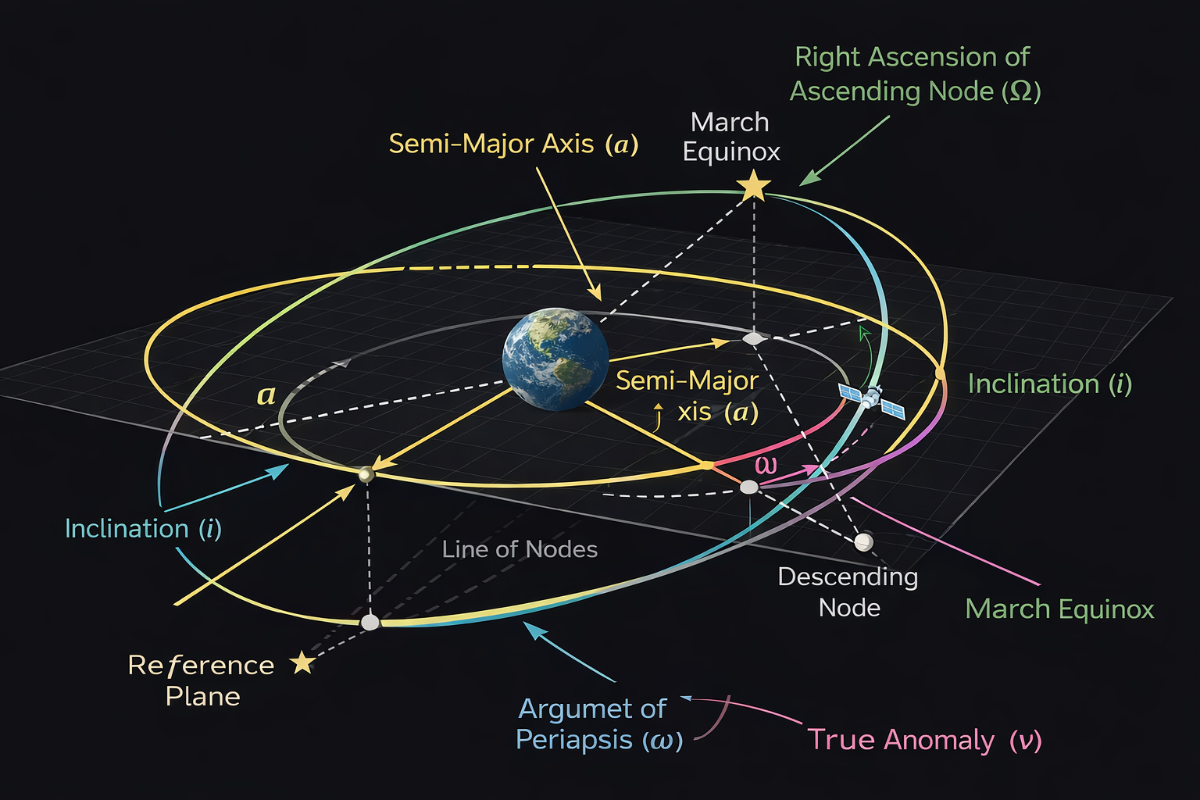
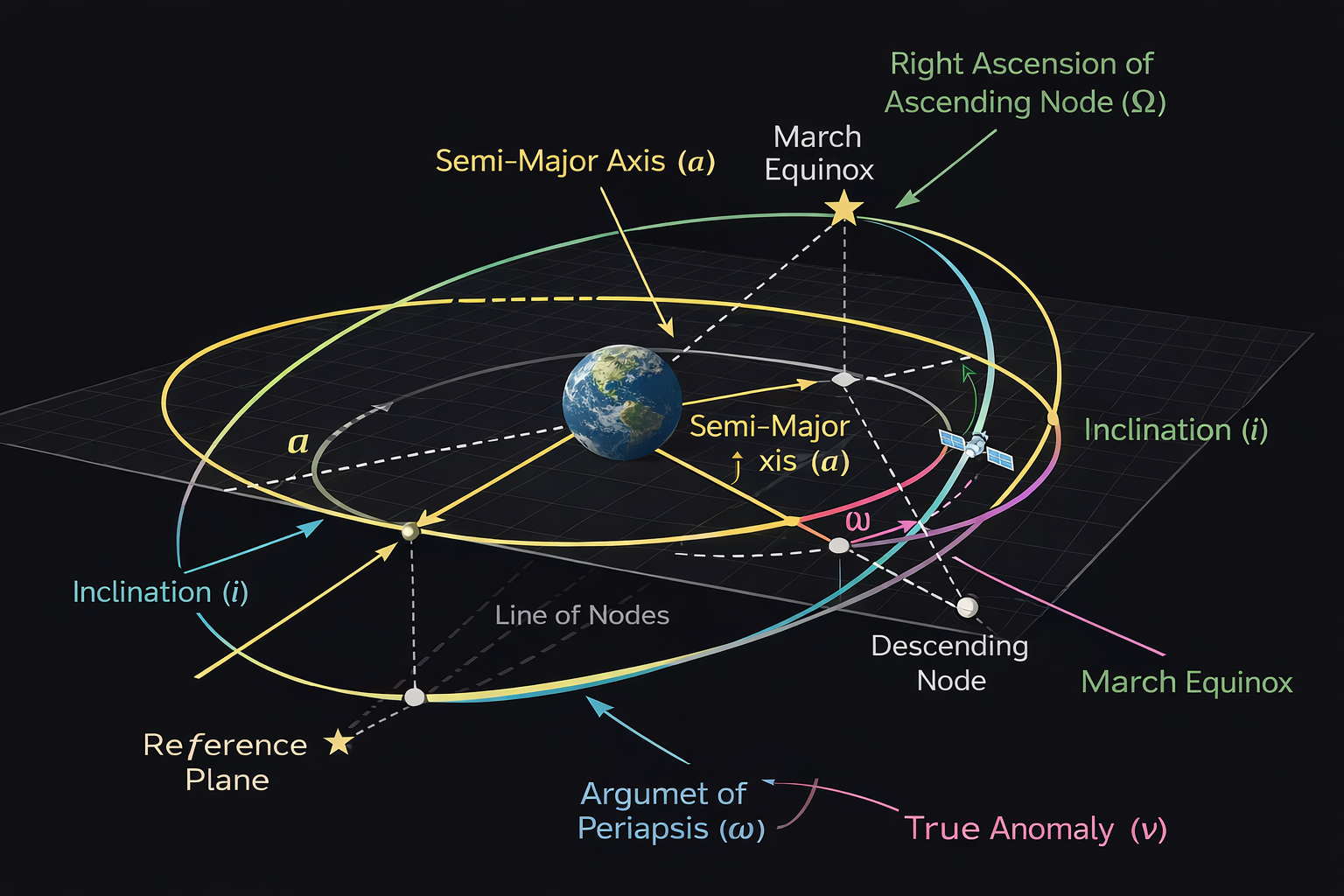
Eccentricity,离心率,描述轨道的离心率,值越接近1,椭圆越扁。
Semi-Major Axis,半长轴,椭圆长轴的一半,决定轨道“大小”。
Inclination,轨道倾角,轨道平面相对于主天体赤道平面的夹角,决定轨道“倾斜程度”。
Right Ascension,升交点赤经,轨道平面与赤道平面的交线方向,决定轨道面在空间中旋转的位置。
Argument of Periapsis,近拱点幅角,近拱点在轨道平面内的位置,决定椭圆“朝哪个方向拉长”。
True Anomaly,真近点角,当前物体在轨道上的实际位置角度。
四、时间系统类
Time Warp,时间加速,泛指游戏时间流逝速度被人为加快的机制。
Fast Forward,快进,低倍率时间加速模式。
Slow Motion,慢动作,降低时间流速。
Paused,暂停,完全停止时间流逝。
Physics Warp,物理加速,在保持物理计算精度的情况下进行时间加速。
五、地图与目标类
Target,目标,当前被选定用于导航与对准的对象。
SOI (Sphere of Influence),影响域,某天体引力占主导地位的空间区域。
Encounter,交会,预测将进入另一个天体 SOI 的轨道事件。
Closest Approach,最近距离,轨道上与目标之间的最小预测距离。
Relative Velocity,相对速度,轨道上与目标之间的最小预测距离。
六、玩家视角类
Camera Mode,相机模式,决定玩家观察载具的方式。
Chase View,追踪视角,摄像机跟随载具移动的外部视角。
Orbit View,环绕视角,摄像机围绕载具旋转的自由视角。
Cockpit View,驾驶舱视角,从载具内部观察的第一人称视角。
Zoom,视距,从载具内部观察的第一人称视角。
Field of View,视场角,摄像机镜头可见范围的角度,单位:度。
七、进阶控制类
PID Control,PID 控制,一种基于误差反馈的自动控制算法,根据“当前误差”计算输出控制量,让系统稳定逼近目标值。
IC Control,输入控制,通过操纵输入通道(pitch/yaw/roll 等)直接控制载具。
Vector Lock,向量锁定,让载具对准指定方向向量。
Autopilot,自动驾驶,让载具对准指定方向向量。
Stability Assist,稳定辅助,自动抑制姿态扰动,保持当前方向稳定。
参与讨论
(Participate in the discussion)
参与讨论